

در این مقاله معادلات دیفرانسیلی مربوط به مدل ریاضی یک موتور BLDC سه فاز دو قطب بیان میشود. همچنین استاتور این موتور دارای سیمپیچ متمرکز با گام کامل است که بهصورت اتصال ستاره سیمپیچی شده است. ساختار روتور از نوع آهنربای داخلی فرض شده است که در آن اندوکتانسهای محورهای d,q باهم متفاوت بوده و لذا مولفه گشتاور رلوکتانسی وجود دارد. برای دستیابی به معادلات دیفرانسیل چهار فرضیه زیر نیز در نظر گرفته شده است.
1) از اشباع هسته، تلفات ناشی از جریان گردابی و تلفات پسماند صرفه نظر شده است.
2) فرض میشود که توزیع میدان مغناطیسی در فاصله هوایی، ذوزنقهای شکل بوده و سطح قاعده کوچک آن نیز 120 درجه الکتریکی میباشد.
3) از اثر کاگینگ صرفه نظر شده است و همچنین فرض شده است که هادیها به طور پیوسته و یکنواخت در سطح استاتور توزیع شدهاند.
4) کلیدهای قدرت و دیودهای هرزگرد بخش اینورتر ایده آل فرض شدهاند و از تلفات ناشی در بخش الکتریکی صرفه نظر شده است.
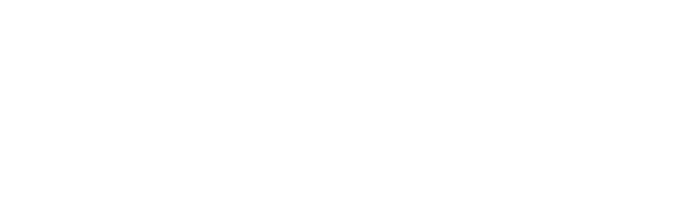
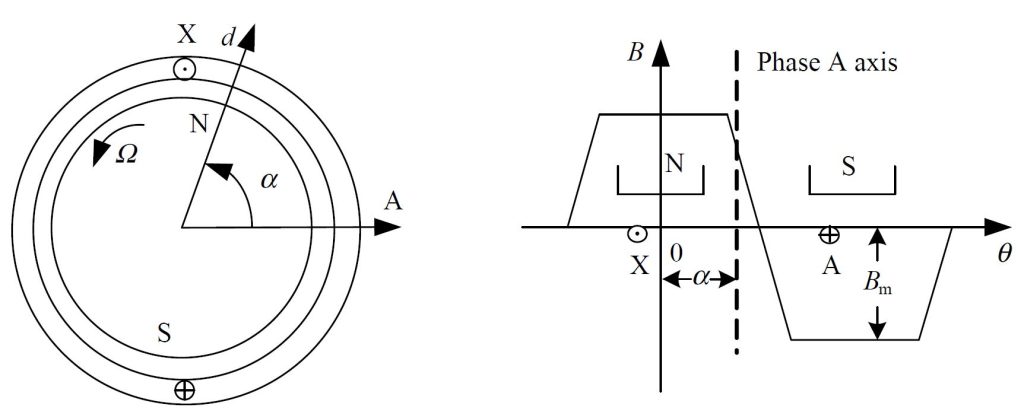
مطابق با فرضیات فوق می توان ساختار موتور و مدل الکتریکی آن را طبق شکل (1) بدست آورد.

طبق جهت مثبت که در شکل (1) قسمت (ج) نشان داده شده است، ولتاژ هر فاز که شامل افت ولتاژ مقاومت و ولتاژ القا شده در آن میباشد طبق رابطه (1) محاسبه میشود. در این رابطه ولتاژ فاز و اندیس به فازهای B، A و C اشاره میکند. جریان فاز و همان EMF القا شده در فاز است.
(1)
همچنین دامنه ولتاژ القا شده در یک دور سیمپیچ از یک فاز برابر است با نرخ تغییرات شار طبق رابطه زیر:
(2)
برای فاز A با توجه به شکل (1) شار طبق رابطه (3) قابل محاسبه است. دراین رابطه اندوکتانس فاز A، و اندوکتانسهای متقابل فاز AB و AC، موقعیت روتور و دامنه شار پیوندی ایجاد شده توسط آهنربا در فاز A است.
(3)
مقدار دامنه شار پیوندی ایجاد شده توسط آهنربا در فاز A، وابسته به توزیع میدان مغناطیسی آهنربا در فاصله هوایی دارد. مؤلفه شعاعی توزیع میدان مغناطیسی آهنربا در فاصله هوایی در داخل سطح استاتور مطابق شکل (2) قسمت (ب) به فرم ذوزنقهای است. مطابق شکل (2) قسمت (الف) در صورتی که روتور در جهت مخالف ساعت به اندازه بچرخد و در موقعیت قرار گیرد، شار موثر در فاز A نیز باتوجه به موقعیت روتور مطابق با رابطه(5) تغییر خواهد کرد. عبارت در رابطه (4) شار موثر ناشی از آهنربا در فاز A را نشان میدهد، زمانی که زاویه موقعیت روتور میباشد. همچنین در رابطه (5) چگالی شار شعاعی آهنربا نصب شده بر روی روتور در فاصله هوایی است، که دارای توزیع ذوزنقهای شکل باتوجه به مقدار است.
(4)
(5)
با استفاده از روابط (2) و (5) و جایگذاری آنها در رابطه (1)، ولتاژ ضدمحرکه در معادله ولتاژ فاز ظاهر میشود.
(6)
روابط (6) شامل عملگر مشتق از اندوکتانس و جریان فاز A موتور میباشند. همچنین اندوکتانسهای خودی (Self-inductance) فاز A و اندوکتانس متقابل (Mutual inductance) بین دو فاز AB و AC که در روابط فوق مشخص است متناسب با مجذور تعداد دور سیمپیچها و نفوذپذیری مغناطیسی هستند که در روابط (7) و (8) نشان داده شدهاند. در این روابط تعداد دور سیمپیچ، نفوذپذیری (Permeance) مغناطیسی ناشی از اندوکتانس خودی فاز A و نفوذپذیری مغناطیسی ناشی از اندوکتانس متقابل بین فاز A و B است.
(7)
(8)
نفوذپذیری مغناطیسی روتور قطب برجسته در جهتهای محورهای d و q متفاوت است. بنابراین اندوکتانس خودی و اندوکتانس متقابل سیمپیچها باتوجه به موقعیت روتور تغییر میکند. برای یک روتور غیر برجسته، شار در همه جهات یکسان است و به همین دلیل ضریب نفوذپذیری مغناطیسی از تغییرات روتور تأثیر نمیپذیرد و در نتیجه اندوکتانسهای خودی و متقابل باتوجه به زمان تغییر نخواهند یافت. تأثیر روتور قطب برجسته در زاویههای مختلف بر اندوکتانس سیمپیچها مطابق با شکل (3) نشان داده شده است.

به طورکلی در موتورهای BLDC از ساختار روتور با آهنربای نصب شده بر روی سطح آن استفاده میشود که در آن اندوکتانس با تغییر زمان ثابت میباشند. علاوه بر این به دلیل متقارن بودن سیمپیچهای سه فاز استاتور، اندوکتانسهای خودی و متقابل نیز باهم برابر خواهند بود.
(9)
با توجه به روابط (9) و جایگذاری آنها در رابطه (6) ولتاژ فاز A طبق رابطه (10) قابل محاسبه است.
(10)
همچنین محاسبه ولتاژ ضدمحرکه در رابطه (10)، طبق رابطه (11) به شرح زیر انجام میشود.
(11)
با توجه به توزیع چگالی مغناطیسی در فاصله هوایی همانطور که در شکل (2) قسمت (ب) نشان داده شده است، B(θ) دارای دوره تناوب 2π بوده و همچنین رابطه (12) برقرار است.
(12)
بنابراین میتوان نتیجه گرفت:
(13)
با توجه به رابطه (13) میتوان گفت که ولتاژ ضدمحرکه وابسته به موقعیت روتور بوده و نسبت به توزیع چگالی مغناطیسی در فاصله هوایی پیش فاز است .
(14)
در رابطه (14) تابع دارای توزیع ذوزنقهای باتوجه به موقعیت روتور است که بیشنیه و کمینه آن مطابق شکل (5) به ترتیب برابر با 1 و 1- میباشد. در این رابطه بیشینه توزیع چگالی آهنربا در فاصله هوایی و بیشینه شار پیوندی آهنربا هر سیم پیچ است. همچنین شکل (4) پیشفازی ولتاژ ضدمحرکه نسبت به چگالی میدان مغناطیسی را نشان میدهد.
همچنین در مورد سیمپیچهای متقارن سه فاز میتوان توابع و را طبق روابط (15) و (16) محاسبه کرد.
(15)
(16)
طبق روابط بیان شده برای محاسبه ولتاژ هر فاز موتور BLDC و همچنین محاسبه ولتاژ ضدمحرکه و اندوکتانسها، مدار معادل الکتریکی موتور BLDC مطابق با شکل (5) قابل بیان است.

طبق شکل (5) رابطه (17) که نشان دهنده ولتاژ فاز A از موتور BLDC است حاصل میشود.
(17)
به طورکلی ولتاژ سه فاز از پایانههای موتور BLDC بصورت ماتریس و طبق رابطه (18) بیان میشود.
(18)
مشابه موتورهای DC تحلیل توان و گشتاور موتورBLDC میتواند از دیدگاه انتقال انرژی صورت گیرد. زمانی که موتور در حال چرخش است، توان از منبع جذب میشود و اگرچه مقداری از آن توسط تلفات مس و آهن اتلاف میشود اما بیشتر توان از طریق فاصله هوایی و بوسیله گشتاور به روتور منتقل میشود که به آن توان الکترومغناطیسی گفته میشود. این توان طبق رابطه (19) برابر با مجموع حاصلضرب جریان سه فاز در ولتاژ ضدمحرکه متناظرش است.
(19)
با صرف نظر از تلفات مکانیکی وچرخشی، توان الکترومغناطیسی کاملا به انرژی جنبشی تبدیل میشود.
(20)
بنابراین گشتاور الکترومغناطیسی طبق روابط (19) و (20) محاسبه میشود.
(21)
با جایگذاری رابطه (14) در (21)، رابطه گشتاور الکترومغناطیسی را بازنویسی میکنیم. در این رابطه پارامتر نشان دهنده تعداد زوج قطبها میباشد.
(22)
هنگامی که موتور BLDC در حالت هدایت 120 درجه کار میکند و از حالتهای گذرا ناشی از انجام کموتاسیون صرف نظر شود، جریانهای درحال عبور از دو فاز در حالت هدایت، دارای دامنه یکسان و جهت مخالف یکدیگر میباشند. همچنین تابع در رابطه (22) برای دو فاز در حالت هدایت جریان، دارای بیشینه و کمینه مقدار خود میباشد. بنابراین رابطه گشتاور الکترومغناطیسی میتواند مطابق با رابطه (23) بازنویسی شود. در این رابطه ضریب گشتاور میباشد.
(23)
در انتها نیز بهمنظور تکمیل مدل ریاضی رابطه گشتاور الکترومغناطیسی و گشتاور بار طبق رابطه (24) با صرف نظر از تلفات آهنی و مسی بیان میشود. در این رابطه ضریب نشان دهنده اینرسی موتور و ضریب اصطکاک است.
(24)



