

موتورهای سنکرون مغناطیس دائم (PMSM) موتورهای الکتریکی هستند که به طور گسترده در کاربردهای مختلف، از جمله اتوماسیون صنعتی، لوازم خانگی، وسایل نقلیه الکتریکی، صنعت پزشکی و…… استفاده می شوند. موتورهای PMSM به دلیل راندمان بالا، نسبت گشتاور به اینرسی عالی و عملکرد روان شناخته شده اند. این موتورها از آهنرباهای دائمی نصب شده بر روی روتور استفاده می کنند که با میدان مغناطیسی دوار استاتور برای ایجاد حرکت تعامل دارند. اگرچه این موتورها با موتورهای BLDC هم خانواده هستند اما تفاوت آنها در شکل موج ولتاژهای ضدمحرکه است. موتورهای PMSM دارای شکل موج سینوسی با سیمپیچی توزیع شده میباشند. در ادامه مهمترین الگوریتمهای کنترلی این موتورها آورده شده است.
برای دستیابی به کنترل دقیق و کارآمد موتورهای PMSM از الگوریتمهای کنترلی مختلفی استفاده میشود. برخی از رایجترین آنها عبارتند از:
کنترل اسکالر روشی ساده است که ولتاژ و فرکانس موتور را تنظیم میکند و نسبت این دو پارامتر را ثابت نگه میدارد. با این حال، فاقد توانایی کنترل دقیق است و نمی تواند به کارایی مطلوب دست یابد.
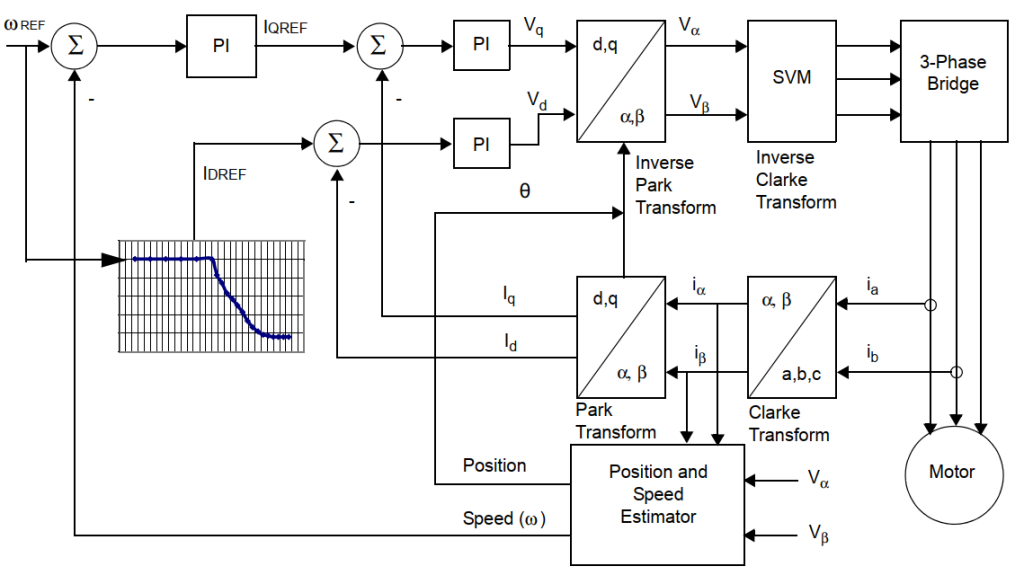
کنترل برداری یکی از رایج ترین الگوریتم های کنترلی برای موتورهای PMSM است. FOC شامل تبدیل جریان های سه فاز استاتور به یک قاب مرجع چرخان، معمولاً قاب d-q است که با شار روتور هم راستا است. این تبدیل اجزای گشتاور و شار را از هم جدا می کند و در نتیجه امکان کنترل مستقل روی هر دو را فراهم میسازد. با تنظیم دقیق جهت و اندازه شار روتور، FOC عملکرد بهینه و تولید گشتاور بالا را در محدوده سرعت وسیع تضمین می کند. چالش اصلی برای پیادهسازی الگوریتم کنترل برداری حجم محاسبات بالا و پیچیدگی آن است که در دهه اخیر با پیشرفت چشمگیر علم در زمینه ساخت پردازندهها و میکروکنترلرها با قابلیت انجام محاسبات زیاد بصورت سریع امکان پذیر شده است.
الگوریتم کنترل برداری شامل دو رویکرد اصلی است:
در این رویکرد، درایو برای دریافت موقعیت و سرعت روتور به حسگرهای خارجی مانند رمزگذارها یا انکدرها نیاز دارد. این اطلاعات برای کنترل دقیق جریان و موقعیت موتور، حصول اطمینان از تولید گشتاور دقیق و کارایی بسیار مهم است. FOC مبتنی بر حسگر در کاربردهای سرعت پایین بسیار قابل اعتماد است اما باعث پیچیدگی سخت افزار، افزایش سایز موتور و هزینه اضافی همراه است.
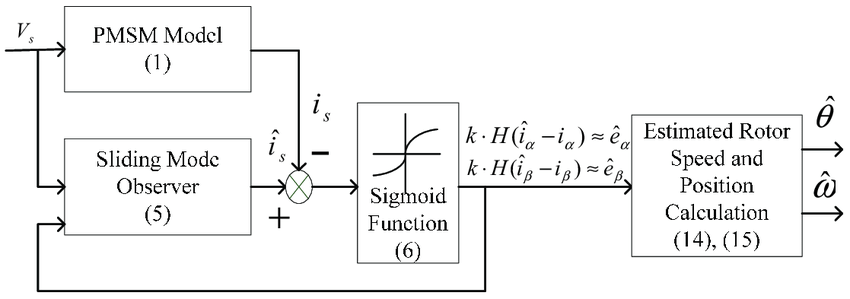
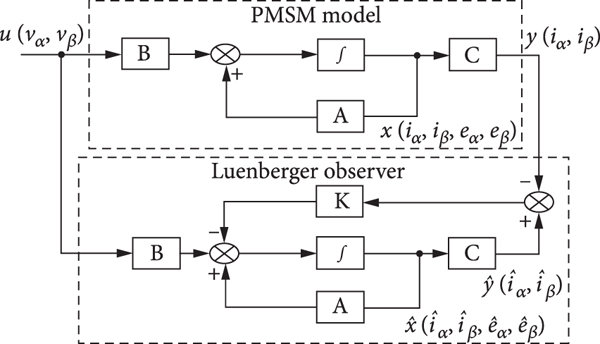
همانطور که از نام آن پیداست FOC بدون سنسور بدون استفاده از حسگرهای خارجی برای بازخورد موقعیت روتور کار می کند. در عوض، موقعیت روتور را بر اساس مشخصات الکتریکی موتور و EMF (نیروی ضد محرکه) تخمین می زند. این رویکرد نیاز به سخت افزار اضافی را از بین می برد، هزینه ها و نقاط احتمالی خرابی را کاهش می دهد. با این حال، FOC بدون حسگر برای پیاده سازی چالش برانگیزتر است و دارای محاسبات ریاضی سنگین است. همچنین رویتگرهای متفاوتی بهمنظور بهبود تخمین موقعیت در راستای کنترل حلقهبسته بدون سنسور مورد استفاده قرار میگیرند و از میان آنها رویتگرهای مد لغزشی(Sliding Mode Observer ) و لیونبرگر(Luenberger Observer) بیشتر مورد استفاده قرار گرفتهاند. به طور معمول در تمامی روشهای حلقهبسته بهمنظور بهبود موقیت تخیمنزده شده، از حلقه قفل شونده فاز(Phase Lock Loop) نیز بهره گرفته میشود که در رفع ناپایداریهای ذاتی سیستم نیز مؤثر است.
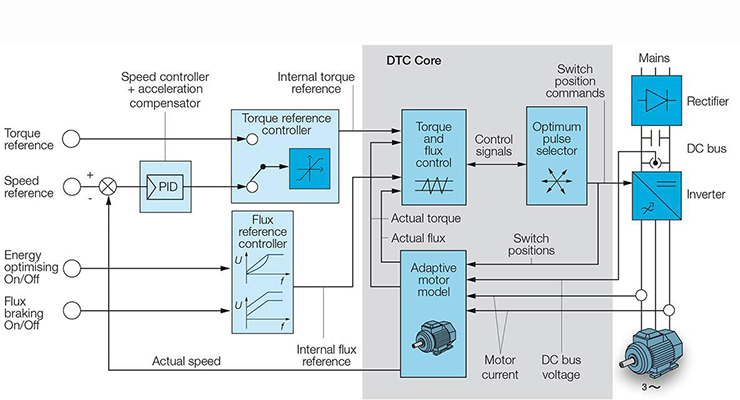
کنترل مستقیم گشتاور (DTC) یک استراتژی کنترلی دیگر است که برای موتورهای سنکرون مغناطیس دائم (PMSM) استفاده می شود و مستقیماً گشتاور و شار استاتور موتور را تنظیم می کند. این روش به دلیل اجرای ساده و عملکرد دینامیکی بالا شناخته شده است و آن را به یک انتخاب محبوب در کاربردهای مختلف صنعتی تبدیل کرده است. DTC رفتار موتور را با مقایسه مقادیر واقعی و دلخواه گشتاور و شار و سپس تنظیم ولتاژ اعمال شده به موتور بر این اساس کنترل می کند. کنترل مستقیم گشتاور میتواند مبتنیبر جدول کلیدزنی انجام شود که در این صورت دارای فرکانس کلیدزنی متغیر است و یا براساس مدلاسیون بردار فضایی(Space Vector Modulation) که مزیت فرکانس کلیدزنی ثابت را دارا میباشد.
DTC پاسخ گشتاور سریع و کنترل دقیق را به دست می آورد، اما نسبت به کنترل FOC از کیفیت گشتاور خروجی کمتری برخوردار است. همچنین در سرعت های پایین دارای عملکرد مطلوب نیست.
در روش کنترل پیشبین اساس کنترل موتور به این صورت است که بر اساس یک مدلی از موتور، جریانهای آینده به ازای ولتاژ کنونی موتور پیشبینی میگردد. سپس با استفاده از جریانهای پیشبینیشده، بسته به هدف کنترلی سایر پیشبینیهای موردنیاز نیز صورت میگیرد. درنهایت، در یک فرآیند بهینهسازی (که معمولاً کمینه کردن یک تابع هزینه است) بهترین ولتاژ برای اعمال در بازه بعدی کنترلی مشخص میشود. یک دستهبندی کلی بر اساس هدف کنترلی میتواند بدینصورت باشد که یا جریانهای ماشین توسط روش پیشبین کنترل شوند و یا گشتاور و شار ماشین. مورد اول میتواند جایگزین روش کنترل برداری(FOC) باشد و مورد دوم جایگزین کنترل مستقیم گشتاور (DTC). در کنترل پیشبین جریان موتور، پس از پیشبینی جریانها، کافی است با مقادیر مرجع مقایسه شوند و بر اساس کمینه شدن خطای جریانها، بهترین بردار ولتاژ به موتور اعمال گردد. در کنترل پیشبین گشتاور و شار، از جریانهای پیشبینیشده برای پیشبینی گشتاور استفاده میشود. همچنین نیاز به محاسبه شار و پیشبینی آن نیز میباشد. درنهایت، با هدف کمینه کردن خطای دو متغیر گشتاور و شار با مقادیر مرجع آنها، بهترین بردار ولتاژ اینورتر طی یک فرآیند بهینهسازی انتخاب شده و در بازه بعدی کنترلی به موتور اعمال میگردد.



