

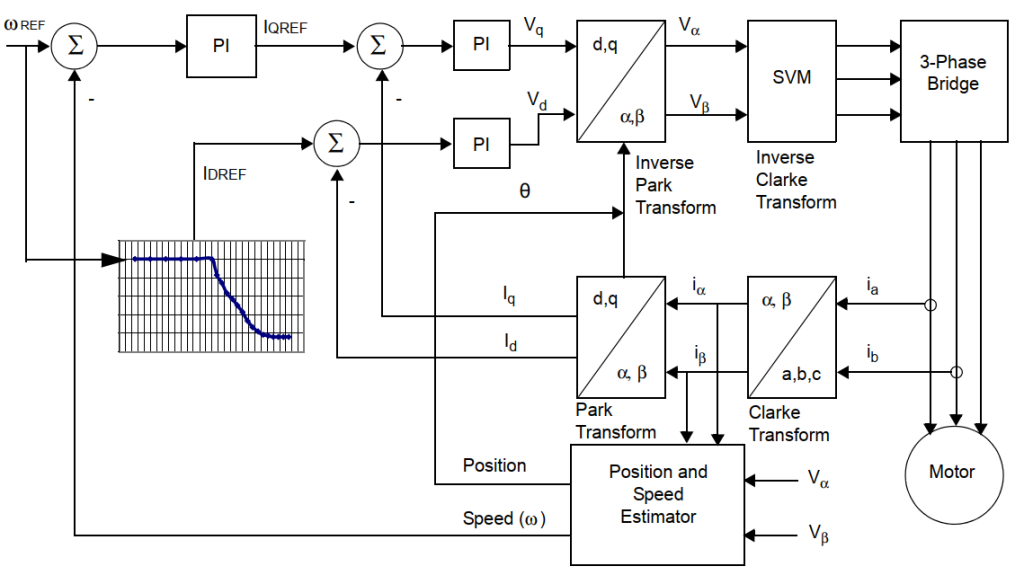
استراتژیهای متعدد و متفاوت کنترل حلقهبسته برای موتورهای سنکرون آهنربا دائم وجود دارد که باتوجه به نوع کاربرد و ویژگیهای موتور ازجمله نوع سیمپیچی و شکل موج ولتاژ ضدمحرکه مورد استفاده قرار میگیرند. کنترل برداری یکی از رایجترین روشهای کنترلی است که از مهمترین مزایای آن کنترل مستقل گشتاور و میدان تحریک است. کنترل برداری میتواند با استفاده از حسگر موقعیت پیادهسازی شود. البته به دلیل وجود مشکلات متعدد استفاده از حسگرها، در دهه اخیر بخصوص با رشد چشمگیر پردازندهها، کنترل برداری بدون حسگر بسیار رایج شده است. در روش بدون حسگر، موقعیت روتور با استفاده از استراتژیهای مختلف تخمینزده میشود و در این میان تخمین موقعیت از طریق ولتاژ ضدمحرکه و تخمین شار رایجتر میباشند.
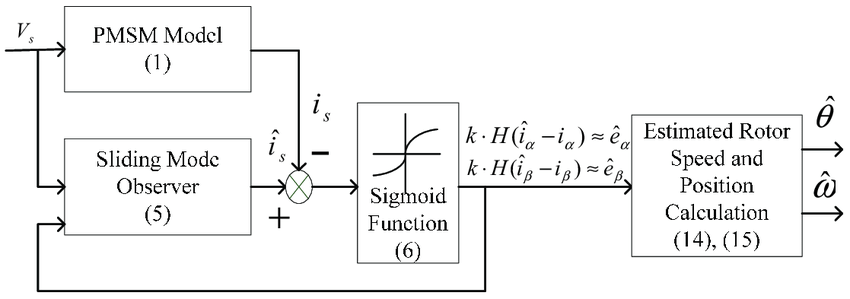
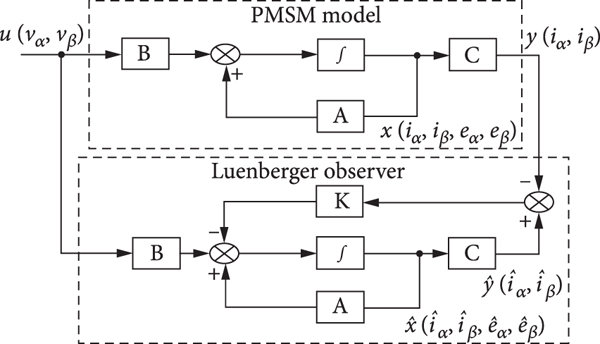
همچنین رویتگرهای متفاوتی بهمنظور بهبود تخمین موقعیت در راستای کنترل حلقهبسته بدون حسگر مورد استفاده قرار میگیرند و از میان آنها رویتگرهای مد لغزشی و لیونبرگر بیشتر مورد استفاده قرار گرفتهاند.
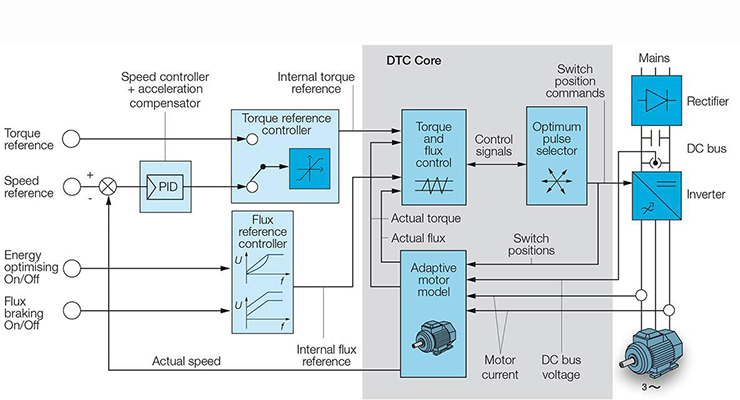
به طور معمول در تمامی روشهای حلقهبسته بهمنظور بهبود موقیت تخیمنزده شده، از حلقه قفل شونده فاز بهره گرفته میشود که در رفع ناپایداریهای ذاتی سیستم نیز مؤثر است. یک نکته مهم در مورد کنترل برداری حلقهبسته، حجم محاسبات بالا و پیچیدگی پیادهسازی است و به همین خاطر روش کنترل مستقیم گشتاور نیز امروزه مورد توجه قرار گرفته است. کنترل مستقیم گشتاور میتواند مبتنیبر جدول کلیدزنی انجام شود که در این صورت دارای فرکانس کلیدزنی متغیر است و یا براساس مدلاسیون بردار فضایی که مزیت فرکانس کلیدزنی ثابت را دارا میباشد. کنترل مستقیم گشتاور نیز میتواند با استفاده از حسگر و یا بدون استفاده از آن پیادهسازی شود.
سایر روشهای کنترل حلقهبسته که کمتر بهصورت تجاری درآمدهاند و بیشتر در موارد خاص مورد استفاده قرار گرفتهاند میتوان به کنترل به روش مدل پیش بین ، کنترل کنندههای هوشمند منطبق بر منطق فازی ویا شبکههای عصبی اشاره نمود. یکی دیگر از روشهای کنترل حلقهبسته بدون حسگر که به طور معمول برای موتورهای آهنربا دائم با ولتاژ ضدمحرکه سینوسی استفاده میشود و دارای بازدهی و همچنین قابلیت اطمینان بالاست و از دقت کافی نیز در تخمین برخوردار است، استفاده از کالمن فیلتر توسعه یافته است. البته تنها نقطه ضعف این روش وجود حجم محاسبات بالا بهمنظور تخمین موقعیت روتور است. روشهای ذکر شده تا به حال، بیشتر برای موتورهای سنکرون آهنربا دائم با ولتاژ ضدمحرکه سینوسی مورد استفاده قرار میگیرند. زیرا که روشهای مبتنیبر مدل موتور بر روی موتورهایی با ولتاژ ضدمحرکه غیر ایدهآل و ذوزنقهای کارایی مطلوبی ندارند. از جمله روشهای رایج برای کنترل موتورهایی با ولتاژ ضدمحرکه ذوزنقهای، روش کنترل جریان شبه مربعی را میتوان نام برد. در روش کنترل جریان شبه مربعی موقعیت روتور به طور معمول توسط حسگرهای اثرهال تعیین میشود و با استفاده ازآن جریان مرجع سه فاز تعیین میگردد. در مورد موتورهایی با ولتاژ ضدمحرکه ذوزنقهای شکل، روشهای متعدد کنترل حلقهبسته بدون حسگر بسیار رایج است و میتوان به روشهای مبتنیبر کنترل شار پیوندی استاتور اشاره نمود. در این روش هیچ نیازی به نقطه خنثی نبوده زیرا که به طور معمول از ولتاژهای خط به خط استفاده میشود. از جمله روشهای تخمین موقعیت روتور موتورهای بدون جاروبک با ولتاژ ضدمحرکه ذوزنقهای، روشهای مبتنیبر ولتاژ ضدمحرکه است. یکی از روشهای مبتنیبر ولتاژ ضدمحرکه اندازهگیری ولتاژ استاتور در فاز شناور و جستجوی نقطه عبور از صفر است.
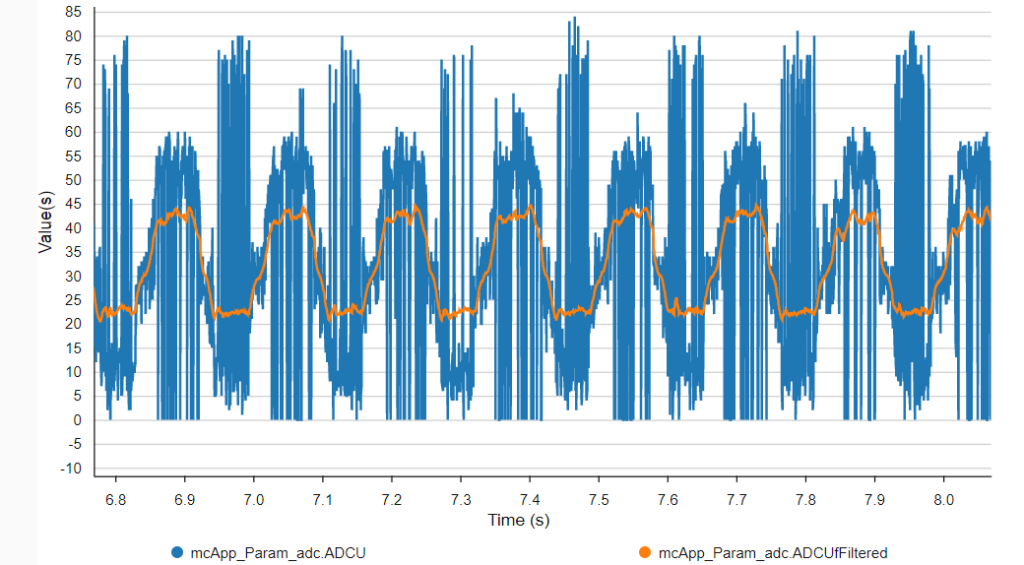
در صورت تعیین نقطه عبور از صفر در ولتاژ فازشناور، کموتاسیون در همان لحظه انجام نمیشود و نیازمند یک تأخیر 30 درجه برای انجام کموتاسیون مناسب است. در این روش همچنین برای حذف نویزهای موجود بر ولتاژ ضدمحرکه از فیلتر پایینگذر و دیجیتال استفاده میشود.
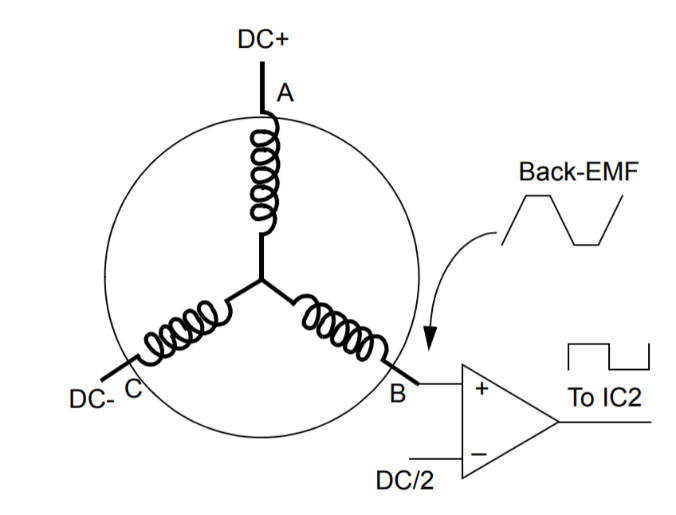
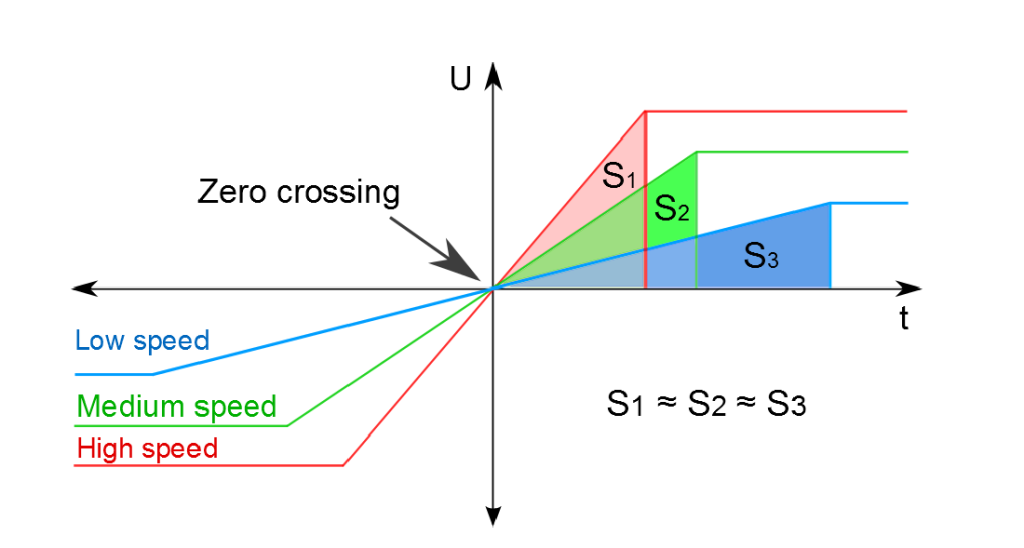
تعیین نقاط عبور از صفر بر اساس مبناهای گوناگون امکانپذیر است. در برخی از موارد نقطه عبور از صفر در فاز شناور براساس ولتاژ نقطه خنثی موتور صورت میگیرد. در این روش اگرچه عملکرد سیستم در لحظه راهاندازی و تغییرات ناگهانی بار مطلوب است اما همیشه نقطه خنثی موتور در دسترس نیست. مبنای دیگر برای تعیین نقطه عبور از صفر مقایسه ولتاژ ضدمحرکه فاز شناور با نیمی از ولتاژ لینک DC است. در این روش مشکل در دسترس نبون نقطه خنثی موتور قابل حل است، اما عملکرد سیستم در راهاندازی و تغییرات ناگهانی بار مطلوب نیست.
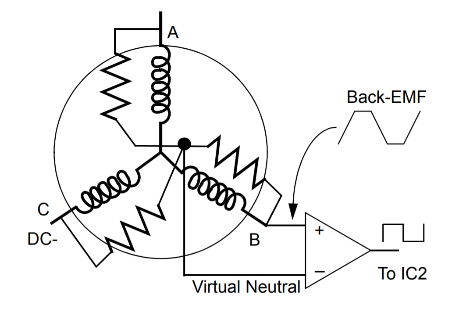
از مبناهای رایج دیگر برای تعیین نقطه عبور از صفر، ایجاد ولتاژ نقطه خنثی موتور به صورت مجازی در خارج از موتور است. این روش دارای پاسخ دینامیک مطلوبی است اما نقطه خنثی مجازی ایجاد شده شامل نویزهای ناشی از فرکانس کلیدزنی است و نیازمند فیلتر پایینگذر میباشد.
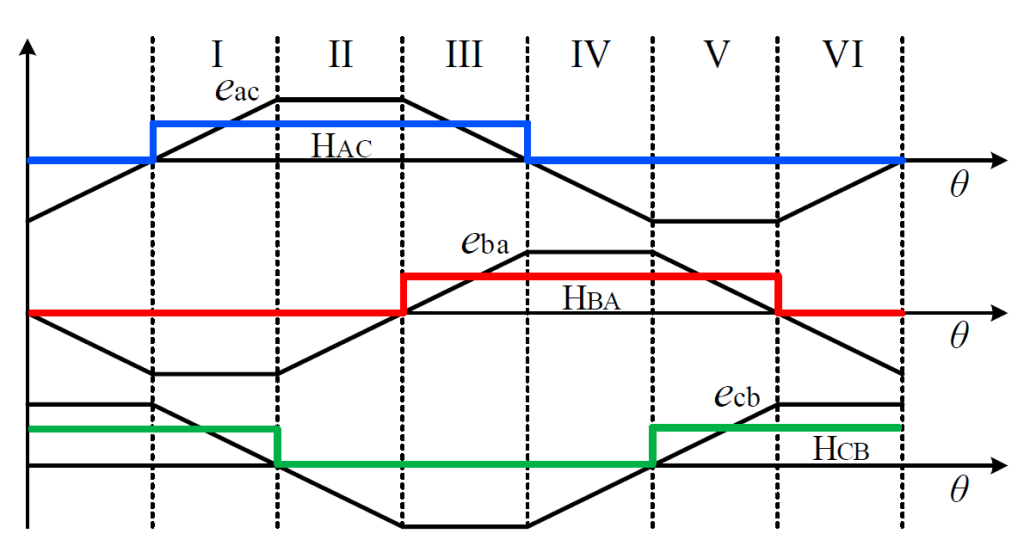
همچنین میتوان ولتاژ نقطه خنثی موتور را از طریق معادلات و در داخل پردازنده محاسبه نمود. در تمامی روشهای ذکر شده مبتنیبر ولتاژ ضدمحرکه تاکنون، پس از تشخیص نقطه عبور از صفر، انجام کموتاسیون نیازمند یک تأخیر فاز 30 درجهای است زیرا که نقاط عبور از صفر موجود در ولتاژهای ضدمحرکه در فازهای موتور، نسبت به نقاط کموتاسیون موتور 30 درجه پیش فاز هستند. لذا بهمنظور حذف این تأخیر و انجام عمل کموتاسیون دقیقا پس از رخ دادن نقطه عبور از صفر، از روش تفاضل ولتاژ خط به خط استفاده میشود زیرا که نسبت به ولتاژ فاز، 30 درجه پس فاز است. این تأخیر 30 درجه منجر میشود نقاط عبور از صفری که در تفاضل فازها رخ میدهد دقیقا با زمان انجام کموتاسیون بین فازها برابر باشد. البته این روش در سرعتهای پایین دارای عملکرد ضعیف است. دامنه ولتاژ فاز به فاز، نسبت به دامنه ولتاژ فاز 4 مرتبه بزرگتر است. برای تعیین زمان انجام کموتاسیون از روش انتگرالگیری از ولتاژ فاز شناور نیز استفاده میشود، بنحوی که پس از عبور ازصفر در ولتاژ فاز شناور از زیر سطح این ولتاژ عمل انتگرالگیری شروع میشود و پس از رسیدن به مقدار آستانه، کموتاسیون بین فازها انجام میشود. این روش نیز اگرچه در سرعتهای بالا دارای عملکرد مناسب است اما ممکن است دچار خطای انباشته شدن شود و به همین دلیل برای سرعتهای پایین نیز مطلوب نیست.
اندازهگیری جریانهای دیودهای هرزگرد در فاز خاموش نیز نقطه دقیق کموتاسیون را مشخص میکند. این روش دارای عملکرد قابل قبول در رنج وسیع سرعتها است اما محاسبه جریانها نیازمند حسگرهای متعدد جریانی است. اندازهگیری هارمونیک سوم ولتاژ ضدمحرکه نیز از روشهای مبتنیبر ولتاژ ضدمحرکه میباشد. در این روش مجموع ولتاژهای ترمینال سه فاز معادل با هارمونیک سوم ولتاژ ضدمحرکه است. نقاط عبور از صفر هارمونیک سوم دقیقا محل انجام کموتاسیون را مشخص میکند. در این تئوری هارمونیک سوم ولتاژ ضدمحرکه نسبت به ولتاژ ضدمحرکه 30 درجه تأخیر دارد و لذا نقاط عبور از صفر تشخیص داده شده در این روش منطبق بر نقاط کموتاسیون موتور هستند. از جمله معایب این روش میتوان به خطای ناشی از انتگرال در ولتاژهای پایین به دلیل کم بودن دامنه ولتاژ اشاره کرد. ولتاژ ضدمحرکه را همچنین میتوان از مدل ریاضی نیز استخراج نمود . اما استخراج ولتاژ ضدمحرکه براساس مدل ریاضی به طور ذاتی دارای خطاهای دینامیکی هستند.


