

موتورهای براشلس (آهنربا دائم) به دلیل مزایای متعدد از جمله نسبت گشتاور به وزن بالاتر، افزایش گشتاور به ازای هر وات توان ورودی، قابلیت اطمینان بالا، نیاز به تعمیر ونگهداری کمتر، کاهش نویز عملیاتی و مکانیکی، طول عمر بیشتر به دلیل فرسایش کمتر و نبود جاروبکها و همچنین نویزهای تداخلی الکترومغناطیسی کم امروزه در صنایع و کاربردهای مختلف مورد توجه قرار گرفتهاند. این موتورها توانستهاند جایگزین مناسبی برای موتورهای القایی باشند و کاربردهای آن در لوازم خانگی و یا در صنایع پیشرفته و حساس مانند هوافضا، تجهیزات پزشکی، حمل ونقل، نظامی و… به چشم میخورد.
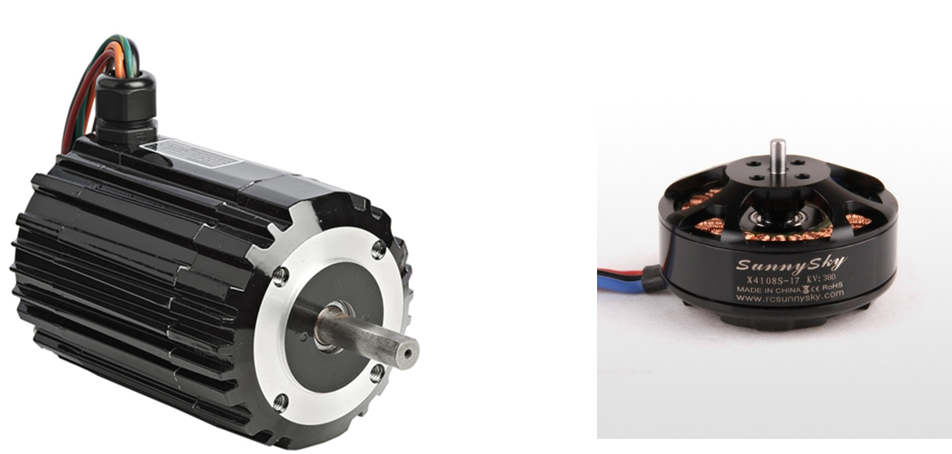
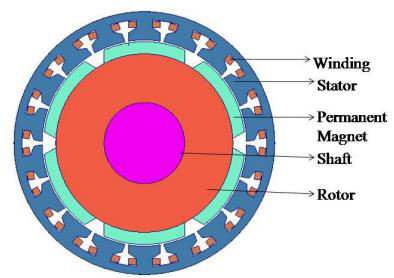
یک ویژگی مهم در موتورهای BLDC، جایگزینی کموتاتور مکانیکی با استفاده از مدار الکتریکی است. در موتورهای dc جاوربکدار عمل کموتاسیون با استفاده از جاروبک انجام میشود به گونهای که در زمان حرکت موتور جهت میدان مغناطیسی اصلی و میدان مغناطیسی آرمیچر عمود بر یکدیگر قرار گیرند. با بهرهگیری از اینورترها و کلیدهای الکتریکی امکان حذف جاروبکها فراهم شده و سیمپیچ آرمیچر و ماده آهنربا در این موتورها به طور جداگانه بر روی استاتور و روتور قرار میگیرند. در مقایسه با انواع دیگر موتورها، موتور BLDC توسط موج مربعی تحریک میشود. بنابراین این موتورها دارای مزایای زیادی از جمله سایز کوچک، گشتاور بالا، بازدهی و قابلیت اطمینان بیشتر میباشند. بنابراین موتورهای BLDC نقش مهمی در بهبود کیفیت محصولات ایفا کرده و همچنین موجب افزایش عمر و صرفه جویی در انرژی میشوند. ساختار اصلی موتورهای BLDC شامل دو بخش اصلی استاتور با سیمپیچ آرمیچر و روتور با آهنربای دائمی است. سطح مقطع یک موتور BLDC چهار قطب در شکل زیر نشان داده شده است.
ساختار استاتور موتور BLDC، شبیه به موتورهای سنکرون و یا موتورهای القایی است. سیمپیچ به صورت متقارن تک فاز یا چند فاز بر روی هسته تعبیه شده است و نوع آن میتواند بهصورت ستاره و یا مثلث باشد. با درنظر گرفتن عملکرد و هزینه، اتصال ستاره بیشتر مورد استفاده قرار میگیرد که در آن سیمپیچهای سه فاز به طور متقارن به هم متصل شده و به طور معمول نقطه خنثی نیز از موتور خارج نمیشود. باید توجه داشت که در موتورهای DC جاروبک دار ساده، سیمپیچ آرمیچر بر روی روتور قرار میگیرد، در حالی که در موتورهای BLDC سیمپیچ آرمیچر بر روی استاتور تعبیه میشود. این موضوع همچنین در کاهش گرما نیز موثر است.
نوع سیمپیچی متداول در موتورهای BLDC، سیمپیچی گام کامل متمرکز است. سیمپیچی گام کامل توزیع شده، سیمپیچ گام کسری توزیع شده و….. از انواع دیگر سیمپیچی استاتور موتورهای BLDC میباشد. تفاوت در نوع سیمپیچی در شکل موج ولتاژ ضدمحرکه و عملکرد موتور تأثیر گذار است.
1) برای سیمپیچی متمرکز با گام کامل، سیمهای یک فاز در یک شیار قرار میگیرند و بنابراین چگالی شار فاصله هوایی در موتور یکسان است. با اضافه کردن ولتاژهای ضدمحرکه تولید شده، توسط سیمهای هر فاز، میتوانیم شکل موج ولتاژ ضدمحرکه کلی را بدست آوریم. سیمپیچ متمرکز با گام کامل، ولتاژ ضدمحرکه ذوزنقهای شکل بهتری را ایجاد میکند.
2) بهمنظور خنک سازی بهتر سیمپیچها از طریق فضای سطح داخل استاتور، سیمپیچ را میتوان به طور یکسان در تمام سطح استاتور توزیع نمود که به آن سیمپیچ توزیع شده گفته میشود. در این نوع سیمپیچی، ایجاد چگالی شار فاصله هوایی به صورت مربعی شکل ایده آل دشوار است و شکل موج ولتاژ ضد محرکه در این نوع سیم پیچی به سینسوسی نزدیکتر است.
3) استفاده از سیمپیچ توزیع شده با گام کسری، امکان کوتاهتر شدن سیمها را فراهم میسازد. این نوع سیمپیچی برای صرفه جویی در مس به علت کوتاهتر شدن سیمها و همچنین تضعیف هارمونیکهای گشتاور مفید میباشد.
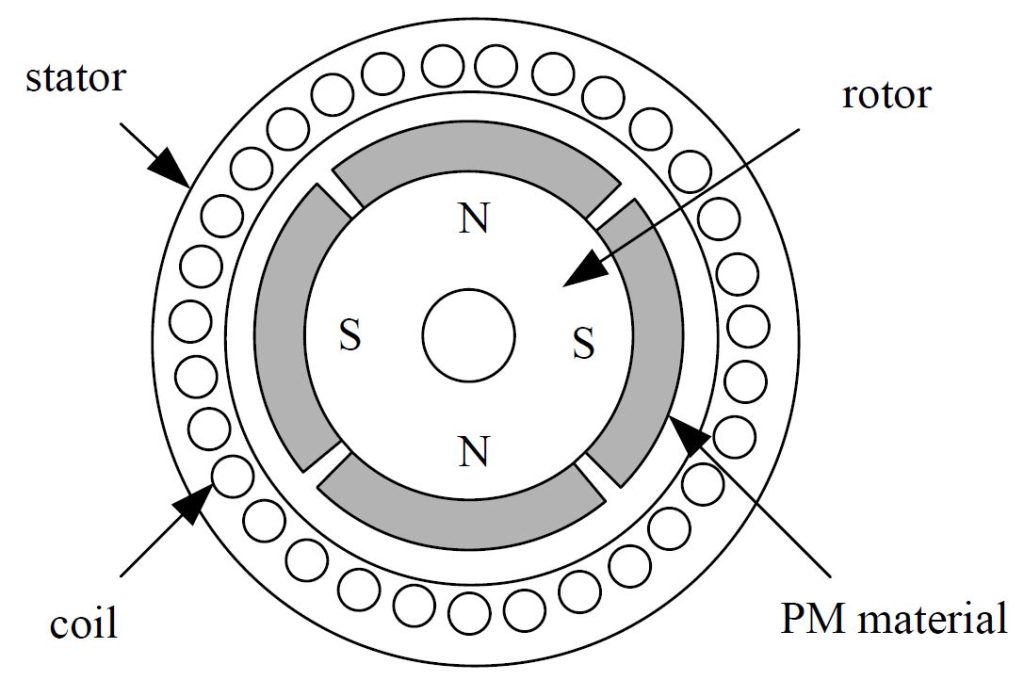
روتور موتور BLDC متشکل از آهنرباهای دائم با تعداد زوج قطب معین است. آهنرباها یا برروی سطح ویا داخل هسته آهنی قرار گرفتهاند. مواد مغناطیسی متعددی از جمله مواد مغناطیسی شامل ترکیبات آهنی و آلیاژهای زمین-کمیاب مورد استفاده قرار میگیرند. آهنرباهای فریت رایج و نسبتاً ارزان هستند. همچنین دارای مقاومت الکتریکی بالا بوده اما در مقابل از چگالی شار مغناطیس کمتری نسبت به آلیاژهای زمین کمیاب برخوردارند. در حال حاضر آهنرباهای دائمی از مواد مغناطیسی نادر در زمین مانند NdFeB ساخته میشوند که به راحتی تحت تأثیر نیروی خنثی کننده دشارژ نمی شوند و دارای خاصیت به اصلاح بازماندگی بالا میباشند. چگالی گشتاور زیاد آهنرباهای زمین-کمیاب نسبت به حجم آهنربا، به کوچکترشدن موتور کمک میکنند. آهنرباها در موتورهای BLDC و یا موتورهای DC جاروبکدار برای تولید میدان مغناطیس مورد نیاز در فاصله هوایی استفاده میشوند با این تفاوت که در موتورهای BLDC در بخش روتور متصل میشوند و در موتورهای DC جاروبک دار، در بخش استاتور. سه نوع ساختار معمول روتورهای موتورهای BLDC در زیر بیان شده است.
در این نوع ساختار، مطابق شکل زیر حالت (الف) آهنربا روی سطح هسته آهن بهصورت شعاعی نصب شده است. در این طراحی همواره سعی میشود تا کمان قطب بزرگتر از 120 درجه الکتریکی باشد تا علاوه بر چگالی شار مربعی در فاصله هوایی، ریپل گشتاور نیز کاهش یابد. در این ساختار به طور معمول برای کاهش هزینهها، آهنرباهای نصب شده بهصورت نوارهای مستطیل شکل میباشند اما برای کاهش ریپل گشتاور، استفاده از آهنربای خمیده موثر است. از جمله معایب این ساختار به حداقل بودن گشتاور رلوکتانسی و جدا شدن آهنرباها در سرعت بالا میتوان اشاره کرد.
این نوع ساختار مطابق با شکل زیر حالت (ب) و (ج) برای کاربردهای سرعت بالا مورد استفاده قرار میگیرد. مزیت دیگر این روش نیز وجود گشتاور رلوکتانسی زیاد است. تنها تفاوت حالت (ب) و (ج) جاری شدن شار در شفت موتور در حالت (ج) است که میتوان با استفاده از شفت غیر مغناطیس از آن جلوگیری کرد.
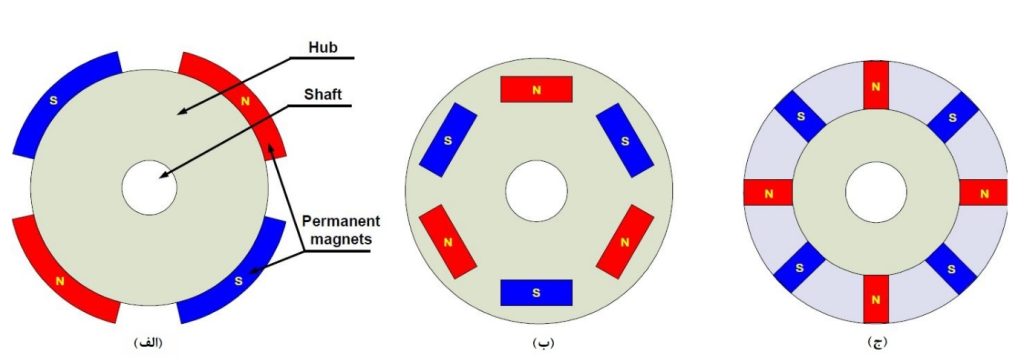
در این روش مطابق شکل زیرآهنربای نصب شده بر روی روتور به صورت یک حلقه میباشد که بهصورت شعاعی مغناطیس شده است. این روش معمولا در موتورهای کم مصرف استفاده میشود.
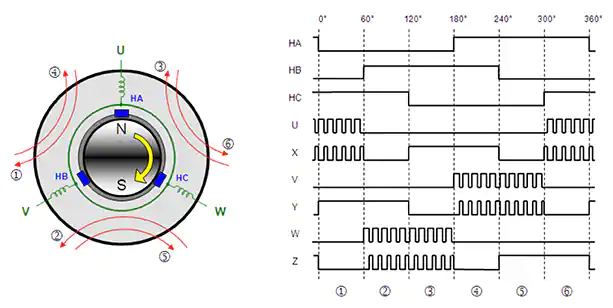
حسگرهای نصب شده در داخل موتور میتوانند موقعیت روتور را تشخیص دهند و به سیگنال الکتریکی مناسب، برای کنترل کلیدها تبدیل کنند. بنابراین جابهجایی مناسب جریان بین سیمپیچها مطابق با اطلاعات موقعیت روتور بدست میآید. حسگرهای موقعیت متنوعی امروزه وجود دارد که هرکدام دارای ویژگیهای خاص خود میباشند و در کاربردهای مختلف مورد استفاده قرار میگیرند. در موتورهای BLDC نیز طیف گستردهای از حسگرهای فتوالکتریک و مغناطیسی استفاده شده است. حسگرهای اثر هال به عنوان نوعی از حسگرهای مغناطیسی، بهدلیل حجم کم، ارزان قیمت بودن و عملکرد مناسب، برای تعیین موقعیت روتور رایج میباشند. در شکل زیر سنسورهای اثر هال با حروف HA، HB وHC مشخص شدهاند.
امروزه به دلیل اهمیت مصرف انرژی و صرفه جویی در آن، استفاده از موتورهای کم مصرف اهمیت بسیاری پیدا کرده است. سهم مصرف توان موتورهای الکتریکی در صنایع، دارای مقدار قابل توجهی میباشد و به همین دلیل جایگزینی موتورهای کم مصرف با بازدهی و کارایی بالا امروزه در صنایع پرمصرف از اولویتهای صرفهجویی در انرژی میباشد. یکی از انواع موتورهای با بازدهی بالا، موتورهای سنکرون آهنربا دائم میباشد که به دلیل مزایای متعدد در صنایع مختلف از جمله صنایع نظامی به دلیل ویژگیهای خاص مانند سرعت بالا مورد استفاده قرار میگیرند. این موتورها همچنین در کاربردها و مصارف خانگی مانند کولرهای گازی و آبی، ماشین لباس شویی و… نیز به دلیل مزایایی از جمله عمر زیاد و تولید نویز صوتی کمتر استفاده میشوند. برخی از کاربردهای رایج موتورهای براشلس شامل موارد زیر میباشد:
1. لوازم خانگی شامل وسایل سرمایشی، گرمایشی، ماشین لباسشویی و….
2. عملگرها و تجهیزات صنعتی شامل جرثقیلها، لیفتراک، دریلها و….
3. تجهیزات پزشکی
4. صنعت خودروسازی به خصوص خودروهای برقی و هیبریدی
5. صنعت هوا و فضا شامل پرندهها، پهبادها، کوادکوپترها و ….



